


Traction Control Explained
A deck of cards; the palm of your hand; your smartphone; the contact patch of the rear tire of your liter-class sportbike. All these are about the same size, roughly 10 square inches of projected area that is adhering oil-based rubber to oil-based asphalt. That’s all you’ve got to transmit more than 160 horsepower, or about 650 lbs of force at the rubber/asphalt interface.
If you, by opening the throttle too far, make a torque request that overwhelms the ability of this contact patch to transmit force, the contact patch of the tire will begin to slide relative to the pavement. Not necessarily the end of the world, as you’ve still got some leeway and the contact patch is still capable of propelling the motorcycle. But you shouldn’t get too greedy. When the tire’s contact patch is moving at roughly 115% of the speed of the bike, the slip-vs-force curve of the typical tire reaches its peak and turns negative. Any higher slip results in less force. Less force to propel the motorcycle is okay, but less force to react to the side load induced by cornering is definitely not okay.

As the tire fails to push back against the cornering load, the motorcycle begins to rotate on its yaw axis. Here you’ve got three options. You can request the same amount of torque and the motorcycle will continue its rotation, terminating in a low-side crash. You can abruptly chop the throttle and as the contact patch force returns, the yaw rotation will convert to an abrupt roll rotation and a resulting high-side crash. Or you can modulate a delicate and nuanced intermediate throttle position that allows the tire to climb gradually and controllably back to the slip peak.

Do you have the skill to ride this slip peak? Is your name Kenny or Freddie, Nicky or Val? Yeah, we didn’t think so. As a result, at least six motorcycle manufacturers ( Kawasaki, Yamaha, Ducati, Aprilia, BMW and MV Agusta) have now introduced motorcycles with factory traction-control algorithms that, when necessary, preempt your imprudent torque request and attempt to keep your tire, not your leathers, in contact with the pavement.
Although similar in many ways, these five traction control systems are all implemented differently; different algorithms, different sensors, different torque-modulation mechanisms. We’ve attempted to decipher those differences and explain how the various OEM implement their proprietary TC systems.
It’s difficult to pin these manufacturers down on the exact details of their TC systems. This is partially deliberate (they are understandably concerned for the secrecy of their proprietary technology) and partially consequential (through the institutional inertia of the corporate structure, we don’t get access to the engineers who designed and tuned the system, we get the marketing guys who sell the thing). So inferring the technical details of the systems can be a bit of a guessing game.
But we’re not completely in the dark here. Ask five guys to design a nail-driving tool, and you’ll get five hammers. They’ll have different head shapes, or different handle materials, or different lengths, but they’ll all be a heavy mass on the end of a lever. Similarly, all of these traction-control systems do the same job — they’ll differ in code organization, in the number of tuning parameters exposed to the user, in the number of lights and buttons on the dash, in the number of sensors. But they all have a common goal: limit rear tire slip. Since the goal is the same, the solutions will be similar. The manufacturers undoubtedly have proprietary algorithms, but they’re all driving the same nail.

Five manufacturers with TC systems on consumer sportbikes (Aprilia, BMW, Ducati, Kawasaki, Yamaha) use high-resolution wheelspeed sensors on both the front and the rear wheels. These sensors were originally intended for use on the ABS systems, with around 50 pulses per wheel rotation. Repurposing these existing sensors makes pragmatic sense. Fundamentally, braking control and traction control are identical mathematical problems — in both cases excess tire thrust force exceeds the tire adhesion limit and results in a wheelspeed change. Riders, reasonably, tend to view accelerating and braking as two completely dissimilar events, but Newton and his Laws of Motion aren’t as picky. A change in velocity is a change in velocity. A sensor adequate to detect a decrease in speed is also suited to detect an increase in speed.
The dark horse in this race is MV Agusta and its F4. Unlike the others mentioned above who use wheelspeed sensors to detect wheel slip, MV instead monitors engine speed exclusively for spikes in rpm. A jump in engine speed that exceeds an acceptable limit dictated by the ECU's preset algorithms is viewed as wheel slip. Speaking in generalities, this is similar to how many aftermarket TC systems operate as well.
You can make a traction control system work with only wheelspeed or engine speed information, but you’re left with a purely reactive strategy — you deal with the wheelslip after it’s already happened. This will work in many cases, but in high excess-torque situations (low gear, high throttle, for example), you’d have a better chance of pulling the rider back from the highside brink if you can predict, even crudely, when the rear tire thrust force might exceed the tire adhesion limit. To do this, you’ll need information about the torque of the engine. Conveniently, because these bikes are fuel injected, this torque information is readily available. All five manufacturers use their existing engine-control sensors — engine speed, throttle angle, and gear position — to infer engine torque and, from that, rear wheel thrust force.

You could stop here, if you wanted to take a minimal approach. You’ve got torque information to help predict the onset of wheelslip and you’ve got wheelspeed sensors to detect when it happens. In fact, this is the approach of both Kawasaki and Yamaha — aside from sensors for engine-control and wheelspeed, Kawasaki and Yamaha have added no additional TC-specific sensors.
Ducati engineers have gone slightly further than the two Japanese manufacturers in their thrust-force pursuit — they’ve added a single accelerometer, measuring the longitudinal acceleration of the bike. (Using the terminology of the discipline, there are, in total, six degrees of inertial freedom: acceleration along three axes, and rotation about each of these three axes. The Ducati system measures only one of them.) Rather than converting engine torque to thrust force with calculations using driveline gear-ratio, tire radius, and rider mass, all of which might change, Ducati just bypasses the whole chain of assumptions and uses the accelerometer to measure acceleration directly.

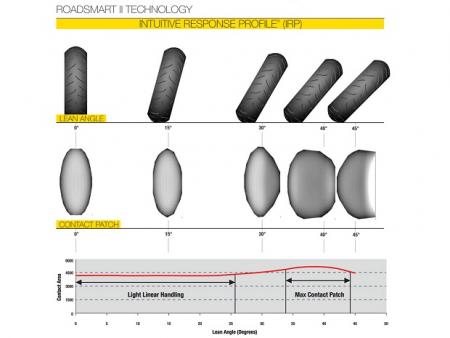
But knowing the rear tire thrust force really only answers one half of the crucial question: When will thrust force exceed the tire’s adhesion limit? A complete answer requires that you also have some idea of the adhesion limit of the tire. Even with consistent pavement conditions, this limit isn’t constant — the tire’s ability to propel the motorcycle forward under thrust loading (acceleration) is reduced as the tire carries more lateral loading (cornering). Riders know this, either intuitively or from hard-learned experience: you must gingerly apply the throttle when the bike is leaned over. You can’t simultaneously turn and accelerate fully because lateral loading on the tire reduces its thrust adhesion limit.
BMW and Aprilia go a bit further than Ducati and include sensors to measure four degrees of freedom: dual accelerometers (longitudinal and lateral acceleration) and dual gyroscopes (roll and yaw rotation). We know that both BMW and Aprilia use the roll gyro data to inform their traction control algorithms. But what is not clear is just how they might use the data from the other two inertial sensors — lateral acceleration and yaw rotation. Both of these could be used to infer tire side-loading as well. There are challenges with this approach, though. Because a motorcycle, unlike a car, rolls into a corner, you would need to correct for the roll angle to get valid results. It can be tricky, and computationally more expensive. Is it worth the effort? Maybe, but from our vantage point, we can’t be sure.

Ultimately, it’s not sufficient for a traction-control system to predict or detect wheelspin – it must also reduce the wheelspin back to a safe level, it must do it quickly, and it must do it controllably. The computer reduces the slip of the driven wheel by limiting the torque of the engine. There are three mechanisms to do this: drop a cylinder, retard the ignition timing, or close the throttles, each having advantages and disadvantages.
1. Dropping a cylinder is an intentional misfire, created by skipping the fuel injection event on one or more cylinders (you can achieve the same effect by skipping the spark event, but this puts unburned fuel into the exhaust and increases emissions). A cylinder drop has an immediate torque response (less than 180 crankshaft degrees on an even-firing 4-cylinder), broad authority (0 to 100% torque drop), but coarse modulation (for a 4-cylinder engine, torque steps of only 25% are available in one engine cycle).
2. Ignition retard has an immediate response as well, and is capable of fine modulation, but it has limited authority (typically no more than approximately 20% torque drop without causing a misfire).
3. Closing the throttle (if an electronic throttle is available on the bike) offers fine modulation, a wide range of authority (0 to 100% torque drop), but typically has slow response.
Kawasaki reduces torque solely by dropping cylinder events (immediate torque response, coarse modulation). Ducati retards the ignition timing (fine modulation, limited range of authority, immediate response) and also drops cylinders. The impressive new Panigale adds throttle modulation to the mix. Aprilia and BMW both close the electronic throttle (fine modulation, wide range of authority, slow response) and also retard the ignition timing. Yamaha, alone of the five manufacturers, chooses to use all three torque-reduction mechanisms, dropping cylinder events, retarding the ignition timing, and also closing the throttle.
| Manufacturer | Traction Control Sensors | Torque-Modulation Mechanism |
| Kawasaki | Front and rear wheelspeed | Drop cylinders |
| Yamaha | Front and rear wheelspeed | Drop cylinders, retard ignition, close throttle |
| Ducati | Front and rear wheelspeed, longitudinal acceleration | Drop cylinders, retard ignition |
| Aprilia | Front and rear wheelspeed, longitudinal acceleration, lateral acceleration, roll angle, yaw angle | Retard ignition, close throttle |
| BMW | Front and rear wheelspeed, longitudinal acceleration, lateral acceleration, roll angle, yaw angle | Rretard ignition, close throttle |
All the manufacturers include a wheelie-control option in their traction control system. A wheelie is a vehicle rotation about the pitch axis and it would be logical for a wheelie detection algorithm to rely on data from a pitch gyro. But surprisingly, none of the manufacturers include a pitch gyro in their sensor package. Instead, they detect a wheelie by comparing the two wheelspeeds. If the front wheel is slowing while the rear wheel is accelerating, the computer infers that the front wheel has lost contact with the ground and it commands a torque reduction. Wheelie intervention is dependent on TC settings or, in the case of Aprilia Wheelie Control, its setting.

The five systems discussed here, evaluated solely on the number of sensors and actuators, can be arranged in a continuum of complexity. Kawasaki is the simplest of all the systems. Yamaha is slightly more complex than Kawasaki, with a similar sensor package, but adding an electronically-controlled throttle. Ducati’s sensor package includes a single inertial sensor but without an electronic throttle (pre-Panigale). Aprilia and BMW deliver the most complexity, each with electronic throttles and four inertial sensors. We should be careful to point out, though, that complexity can only be justified in any system if its costs (more time to develop, more software to support, more parts to purchase, and more failures to tolerate) are offset by increased capability.
Few have the skill, valor, or foolishness to fully probe how these traction-control systems work at the limits of adhesion, so I am not making an evaluation of these systems’ capabilities. But just remember, complexity doesn’t necessarily equal competence.
Related Reading
2012 Japanese Superbike Shootout - Video
2012 Yamaha YZF-R1 vs. 2011 Aprilia RSV4 R APRC [Video]
2012 BMW S1000RR Review [Video]
2011 Kawasaki ZX-10R Review
2011 Ducati 1198 SP Review
2012 Ducati 1199 Panigale Review
2010 Kawasaki Concours 14 Traction Control [Video]
More by David Sprinkle
























Comments
Join the conversation