


Church of MO: Ghostriding With the Blue Team


And at that time, 14 years ago, General Ets-Hokin went out among the Berkeleyites and Roombas and came back with this story about a young engineer working on a robotic motorcycle for the military. The actual file has mysteriously disappeared from the MO archive: Luckily, Gabe had saved the story and has lived to tell it (though his computer with the photos has expired from complications due to lack of a charging cord). Meanwhile Anthony Levandowski, who has kept on pursuing his self-driving dreams, suddenly finds himself in the news, and not in a good way. There’s an excellent summation of his troubles at Wired, among many other places. (Note that MO’s original story is the only one to spell Mr. L’s name correctly. Boom!)
Ghostriding With the Blue TeamRobot Motorcycle Takes on the World
Story by: Gabe Ets-Hokin, November 2005
Imagine a future battlefield…
A platoon of US Marines is holed up in a warehouse in an embattled city. Insurgents have them surrounded, and they are isolated in hostile territory 10 kilometers away from the Marine’s fortified base. Cheap surface-to-air missiles and RPGs have thwarted attempts to evacuate them by helicopter. They’re almost out of ammo, and they have wounded, including one man losing blood and teetering on the brink of death. The Corpsman attending the injured man is saying if he doesn’t get to a hospital in hours, he’ll die.
Suddenly, outside in the smoke and haze, the Marines hear the loud ripping notes of Gatling guns. In between the roaring, zipper-like sounds they can hear the putting of single-cylinder motorcycle engines. Seconds later, five strange green-painted shapes burst through the narrow warehouse door and quickly come to a stop. They look like small motorcycles with large boxes on top. They are bristling with machine guns, rocket pods and antennae. The long, armored boxes are big enough to hold a man.
The Marines rush to the idling vehicles waiting on their retractable outriggers and start unloading heavy crates of ammo, food and water cans out of the cargo boxes. When they finish unloading, they slide their wounded men into the armored boxes and secure the hatches. The lieutenant walks up to the lead vehicle and tells it to watch out for the insurgents one of his patrols saw armed with RPGs to the north of the warehouse. The robot motorcycle acknowledges with a crisp “aye-aye, sir!” and roars off into the dark smoke-filled night, scanning the blackness with its infrared eyes as the other robots follow.
It sounds like a Ridley Scott movie, but robotic vehicles on the battlefield are quickly becoming a reality. Already in Afghanistan Unmanned Aerial Vehicles (UAVs) and 45-pound “Packbots” from iRobot (who make the “Roomba” automatic vacuum cleaner) assist ground troops in such missions as reconnaissance and searching caves. The tireless nature and relatively cheap cost of machinery makes robots an attractive option for missions like reconnaissance, explosive ordinance disposal or any number of other dangerous, tedious missions.
Congress has mandated that by 2015 1/3rd of ground combat forces have to be tele-operated, so a lot of hardware needs to be tested and built. Present-day ground robots are stupid, slow and unreliable, with limited capabilities and range. To help spur private enterprise, the Defense Advanced Research Projects Agency (DARPA) put together a competition called the Grand Challenge, to encourage researchers to develop a robotic vehicle that could navigate a long course without human assistance.
The rules are tough. The vehicle must navigate a 131-mile course with no human guidance and just a route map to show the way. DARPA officials place obstacles and holes in the vehicle’s path to make it as challenging as possible. The vehicle with the best time under 10 hours takes home the 2 million dollar prize.
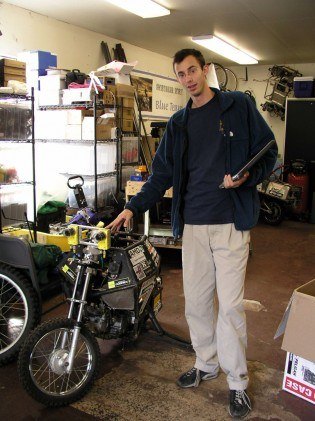
Enter Anthony Levandowsky. The 25 year old engineer started working on the Robot Bike project while still a graduate student at UC Berkeley’s school of engineering when his mother, who works for the European Union (EU) government told him about the Grand Challenge. Levandowsky, a nascent motorcycle rider and roommate to AFM roadracer Mike “Mr. Crash” Solis decided to build a robotic motorcycle that could compete for the prize. Why build a motorcycle when a four-wheeled vehicle would be much simpler?
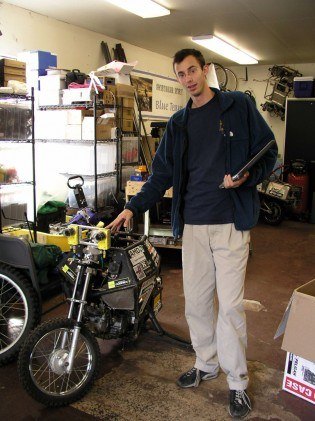
“A small motorcycle has huge advantages over a car” explains the tall, lanky Levandowsky in the small, cluttered laboratory at a UC Berkeley research facility, “you can drive it indoors, you can pick it up, you can drop it from a helicopter.” A motorcycle, with its light weight and simple design, is also cheaper to build, easier to maintain and has less mass then a car or truck, which means less crash damage. “Even a single five mph crash can seriously damage a car, but we have over 800 crashes on one prototype.” Also, a motorcycle can go places a larger vehicle can’t, which could be a useful tool for firefighters and rescue workers.
Developing the vehicle was a long road. The “Blue Team” was put together with students and researchers from UC Berkeley and Texas A&M University, with experts in computer science, mechanical engineering, electrical engineering, and mathematics. The students are a diverse group, representing folks from the US, Russia, China, Taiwan, France, Korea, Macedonia and Belgium.
The team rightly predicted that no one would be able to complete the challenge in 2004, so they could develop their project over two years. In that time, they built three different prototypes and deployed them on hundreds of test runs all over California. When it came time for the big day in October, 2005, the vehicle was not able to complete the qualification process due to carburetor and fuel line problems, but the discoveries and achievements made it worthwhile to the team, who were not expecting to win anyway.
“The DARPA people were shocked” that they got the vehicle to function, said Levandowsky when I asked him about the government’s reaction to the only motorcycle in the 32-team field. They were interested in the dynamic balancing software the Team developed for possible use on ARVs (5-ton robotic armored combat vehicles) to help them from getting stuck in the sand. Many other companies and agencies are interested in the work the Team did, and it wouldn’t be surprising to see several commercial ventures relating to motorcycle and vehicle control and safety systems hitting the market in the next decade, as Levandowsky has already started and sold two companies since he’s been in college. He’s an enterprising guy, and he picked my brains during the interview to see if I had any ideas about commercial applications of his inventions.
The third Ghost Rider bike didn’t look the way I expected it to. Instead of a motorcycle with a robot sitting on it, the Ghost Rider looks like a small box with dirtbike tires sticking out of both ends. It’s based on a Honda CRF70, which is the largest bike Honda makes with a centrifugal clutch. Is 70cc too small for this application? Levandowsky thinks that smaller is better; the 70cc bike can do 40mph, which is faster than the computer can process data and more than twice as fast as the requirements for the Challenge.
Brakes, suspension, steering geometry, fame dimensions, motor and final drive are all stock. A roll cage and retractable outriggers are welded to the frame. I asked Levandowsky who did the welding and machining work for the team, and he told me they do all the machining and welding themselves. “I just bought the machines, got the books and learned it.” A project like this clearly requires a well-rounded engineer.
Sensory input is provided completely by a traction sensor and a pair of cameras mounted like eyes on special self-stabilizing gimbals above the steering head. Levandowsky could have used the laser land scanners the other teams used, but he said that would be “cheating.” Lasers provide a fraction of the information cameras do, but the information is simple and quick for the robot to digest. However, the lasers don’t tell the robot what kind of obstacles they are, or what they are made of, just that they are there and they have to go around them.
Levandowsky wants to develop a machine that can “see” like a person, not feel around like a mole.
The cameras deliver 2,000 times more information than the laser land scanners, but it’s difficult to make that information useful to the robot. That’s where the massive computer processing power we now have available to us is handy. In this video(off-site), you can see how the computer “sees” the imagery sent in by the cameras. The binocular effect allows a three dimensional map to be modeled, allowing the robot to pick its way over, under and around obstacles as well as a vehicle equipped with laser scanners. And as cameras and processors get better, robots will be able to see better and farther than humans.
This is sensible, because one thing machines lack is a sense of caution. “The hardest part was building fear into it”, says Levandowsky, holding up a pair of damaged front wheels from a pile at one end of the lab. The robot needs to be able to tell a hole from a shadow, a pile of leaves from a pile of bricks, a speed bump from a curb. But this idiot intrepidity can be a good tool: “I like the fact that it has no fear.” Try getting a Honda test rider to see how much traction a roadracing slick has on wet pavement at 100 mph and you probably won’t get the whole story, but a robot will try any stunt, over and over, until it’s completely destroyed. And then you can build another one.
The crudity of present sensors and processing systems means autonomic vehicles don’t exactly go tearing around: “Robots don’t drive like teenagers, they drive like grandmas.” That’s one reason why even the winner of the Grand Challenge, a Volkswagen Touareg built by Stanford University named “Stanley” averaged only 19 mph, even with a huge V-10 diesel motor. However, as camera and computer technology progresses, the future might see robotic vehicles safely traveling much faster than even the most reckless teenager.
The motorcycle is steered and balanced through a specially modified steering head fitted with a harmonic gear and drive motor, and all steering inputs go through it. Levandowsky is definitely not an adherent of the “body steering” school of thought when it comes to motorcycle physics: “Turning is achieved by the motorcycle being at an angle and you putting force on the wheel to keep it stable or not. Over 5 mph, the most adjustment you can get is 10% of what you can get through counter-steering. Nothing on our motorcycles moves aside from the steering head. You can get away with only leaning, but only below a certain speed.”
All this thought about motorcycle design and control has helped Levandowsky with his own motorcycle riding. “Since I’ve started working on this project I’ve become a more aggressive rider. I know the limits of the bike are much higher than what I thought they were.” He has put about 16,000 miles on his Suzuki DRZ-400 since he started riding a few years ago, and he insists all the engineers on his project ride a motorcycle at least once before they come on board.
Levandowsky is modest about his achievements, but I was very impressed by the planning, long hours and passion that went into a project that had pretty depressing results. But the 25 year-old is upbeat and happy about his little robot and hopes it will be a useful thing for mankind. I asked him how he felt when he watched the Ghost Rider drive around a course. He said he was used to seeing it, after spending so many hours working on the project, but that “It’s rewarding to see you were able to build something that everybody told you “don’t build it, it can’t be done.'”
Sure, we could all take the easy way out and hop in an SUV, but where’s the challenge?
More by John Burns
























Comments
Join the conversation
Great article Gabe as usual.
Imagine a future in wich there are no soldier platoons or embattled cities... ;)