


Ask MO Anything: How Do Different Tires Affect My ABS and Traction Control?

Dear MOby,
Does changing tires or wheel size on a bike that has IMU-based lean-sensitive ABS/TC performance alter the calculations or algorithms that are coded? I can understand ABS working okay because it’s monitoring wheel speed via the ABS rings, but unsure how the leaning TC would work.
As examples:
1) Say a bike comes with 50-50 tires and the owner installs full on knobbies, or the reverse, 100% pavement tires. Those tires will provide significantly different grip characteristics on both pavement and dirt. How does the logic compensate for that? Or does the rider need to change the ABS/TC intervention level (if it can be changed), such that (for example) a Level 3 with 50-50 tires would equal a level 6 with dedicated street rubber, and level 1 with knobbies (the actual numbers are unimportant, just used for illustration)?
2) A bike that comes with a 21/18-inch wheelset that the owner changes for a 19/17-in wheelset. Like others, I did this with a KTM 990 Dakar. I liked the bike better on most surfaces more with the 19/17, and saved the 21/18 for dual sport/adventure events where the terrain was really off road. I know the 990 did not have an IMU; my observation is that that bike’s regular ABS worked the same. But folks do this with 1190s, and some even have installed 17/17-in wheelsets on 1190s.
Trying to get a grip,
Walter Barlow
Dear Walter,
As a guy whose only computer training involved punch cards circa 1980, I hate questions like this one. Let’s ask some experts, first of all KTM North America’s Tom Moen, who tells us:
“All the electronics technologies vary in the different systems; Walter’s 990 was a simple but effective ABS system that measured the wheel sensor speed differences between front and rear wheels. On that bike, the wheel sizes did affect the sensor speed, but the system was basic enough that it still worked, even though it was never recommended to do so. Different tire types did not affect the ABS function; if you tried to lock up the rear wheel in a straight line, it would act the same whether it was a knobby or street tire.
“For TC, changing tire types or sizes is kind of like varying street conditions; whether it’s wet or dry, the sensors do their same job, sensing that the wheel speeds are changing. For TC on KTMs, each model range has different systems, mostly because the systems have been evolving so rapidly since the original 990.
“The 1290 Super Duke R was the first model that you could control or adjust the TC, it had 1 to 9 levels where you could control the rear tire spin: 1 was the minimum intervention, almost like no TC, and 9 was maximum intervention. In 9, you could ride with rain tires in the wet with no wheel slip.
The different ride modes now kind of set TC pretty much without the rider having to think about it. We could spend days and pages describing and explaining it. Our current cornering TC has so many sensors along with IMU measuring g-force forward and aft, rate of lean plus the angle… the wheel sensors are comparing acceleration between each other, and it’s all doing it all so fast it’s almost not possible to believe it can work, and it works amazing.”
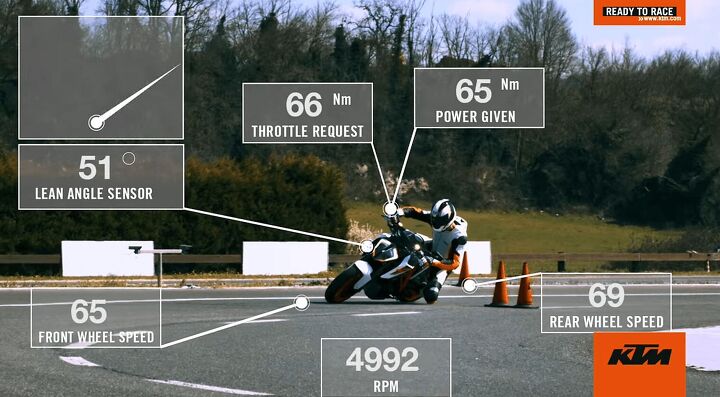
There are a bunch of interesting vids over at KTM’s site that really only scratch the surface of how it all actually works, but more about the results/benefits. There’s also this totally unrelated one of Taddy Blasuziak explaining how to do a pivot-turn wheelie. Looks easy when he does it.
Meanwhile at Ducati, when we borrowed a SuperSport and put on different tires for our Laguna Seca track day last summer, our Ducati media contact told us to be sure and reset the bike’s brain to compensate for the different Pirellis, even though they were the same sizes from the same manufacturer.
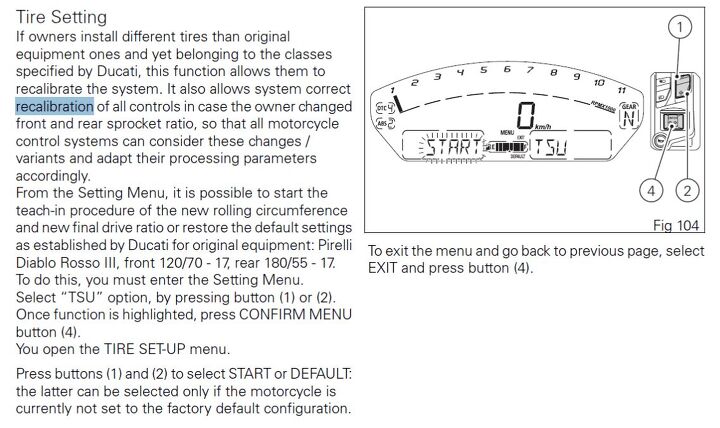
There’s another page or two after this one in the SuperSport’s owner’s manual describing how to do this. While I was reading it and scratching my confused head, Ryan Burns rode the bike down the street, came back, and said, “OK done.” Those damn millennials.
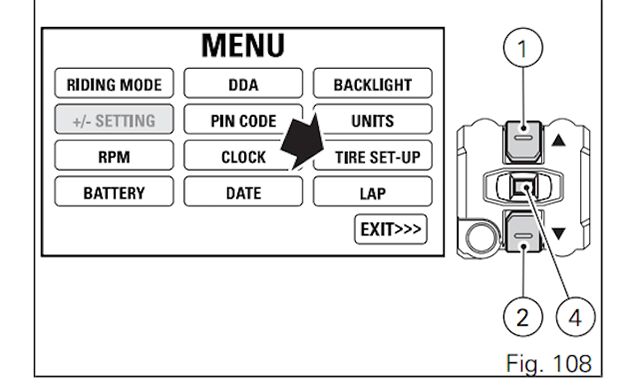
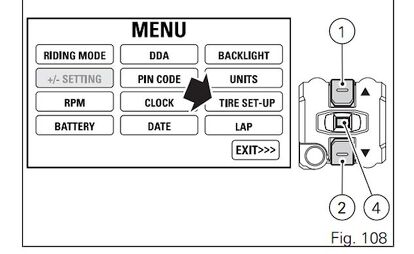
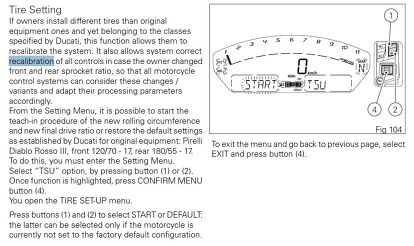
The SuperSport uses the older Bosch 9MP ABS, which is not lean-sensitive, so I was thinking maybe that need to recalibrate would be a thing of the past on newer Ducatis with IMUs. Checking the manual of the latest Panigale V4, complete with ABS Cornering EVO, Ducati Traction Control 2 EVO and all the rest of it for comparison sake, however, there’s still the same “Tire Set-Up” section, all the way from page 192 to 195: If owners install different tyres than original equipment ones and yet belonging to the classes specified by Ducati, this function allows them to recalibrate the system. It also allows system correct recalibration of all controls (such as DTC DWC [wheelie control] EBC [engine brake control]) in case the owner changed front and rear sprocket ratio, so that all motorcycle control systems can consider these changes / variants and adapt their processing parameters accordingly.
How two different brands of bike, both using basically the same IMU, work completely differently, is more than Ask MO can deal with at this time, and a subject of ongoing investigation.
A few months ago at a Triumph launch (Rocket 3), I asked Chief Engineer Stuart Wood if the IMU made it easier to program ABS and TC into each individual bike. To my punchcard brain, it seems that since the IMU can be telling the computer when the bike’s out of shape instead of waiting for all the other sensors to compare notes, like Congress, it would be way easier? Wood told me that it actually makes it even more time-consuming. First an ABS map for straight up and down has to be programmed, then more maps for various angles of lean. The same goes for TC. As for other brands, feel free to weigh in/ enlighten us all in the comments section.
One last thing: There’s an excellent in-depth interview about IMUs with Bosch’s Matthias Mörbe – who holds the title of Vice President of Engineering Two-Wheeler and Power Sport, Europe, and Product Manager for Sensors, World – over at Bennetts. Don’t forget to come back to MO.
Direct your motorcycle-related questions to AskMoAnything@motorcycle.com, though some say we’re better at non-motorcycle-related ones…
More by John Burns























Comments
Join the conversation
Slightly off-topic, but in my experience, both with cars (when I still owned one) and with bikes, one of the most effective upgrades one can do to one's vehicle is to mount a better quality tire when the previous set needs replacing. A better tire will give better handling, better braking, better stability, and depending on your objective, better mileage.
Yes, one will pay a bit more (maybe 20-30%), but it's the difference between shelling out $400 for a cheaper, mediocre set of tires and paying $500 for a set of quality tires, and the dividends are spelled out above.
Great topic. Thank you, Walter and MO.